

دانلود کد برنامه نویسی شبیه سازی رادار RADAR
موضوع پروژه: سورس کد برنامه رادار اخطار دهنده سریع تا فاصله 80 کیلومتری و زبان برنامه نویسی مطلب
مسیر یابی داخل شهری و بین شهری.
زبان برنامه نویسی: متلب MATLAB
محیط برنامه نویسی: Mathworks MATLAB
توضیحات از ویکی پدیا :
رادار (Radar) از حروف اول کلمات Radio Detection and Ranging به معنای کشف و فاصله یابی رادیویی گرفته شده است. این اصطلاح را نیروی دریایی آمریکا در سال 1941 پیشنهاد داد و حدود 76 کشور آن را پذیرفتند.
همانطور که امواج دریا و امواج صوتی پس از رسیدن به مانعی منعکس میشوند، امواج الکترومغناطیسی هم وقتی به مانعی برخورد کردند، بر میگردند و ما را از وجود آن آگاه میسازند. به کمک امواج الکترومغناطیسی نه تنها از وجود اجسام در فاصله دور باخبر میشویم، بلکه بطور دقیق تعیین میکنیم که آیا ساکن هستند یا از ما دور و یا به ما نزدیک میشوند؟ حتی سرعت جسم نیز بخوبی قابل محاسبه است. وقتی امواج منتشر شده از رادار ، به یک جسم دور برخورد میکنند، به طرف نقطه حرکت بر میگردند. امواج برگشتی توسط دستگاههای خاص در مبدا تقویت میشوند و از روی مدت رفت و برگشت این امواج ، فاصله بین جسم و رادار اندازه گیری میشود.رادارها حتی در توپخانهها ، موشک اندازها و جنگهای زیر دریاییها نیز وارد عمل شدند و توجه قدرتهای بزرگ تسلیحاتی را ، حتی پس از شکست هیتلر و پایان جنگ جهانی به خودشان جلب کردند. اما صرف نظر از کاربردها نظامی، رادار خدمات صلح آمیز بسیاری را برای انسان امروزی در برداشته است. کاهش سوانح در مسافرت های دریایی و هوایی همگی مدیون رادار هستند.
در حقیقت یکی از مهمترین کاربردهای علمی رادار با آغاز عصر فضا ه وجود آمد و بشر توانست برای اولین بار با کمک رادار به فضا دسترسی پیدا کند و حتی سطح سیاره ها و اشکال گوناگون آنها را شناسایی کند. این موفقیت سالها قبل از آنبود که سفینه ها بتوانند از سطح سیارات عکسبرداری کنند. بنابراین رادار علی رغم خرابی هاییکه با گسترده تر کردن جنگلها به وجود آورد، توانست خدمات بسیار ارزنده ای را برای جامعه بشری به ارمغان آورد و انسان این همه را مدیون طبیعت بی ادعاست!
هواشناسان برای شناسایی طوفانها، تندبادهای دریایی و گردبادها از آن استفاده میبرند. شما حتی نوعی خاص از رادار را در مدخل ورودی فروشگاهها میبینید که در هنگام قرار گرفتن اشخاص در مقابلشان، درب را باز میکنند. بطور واضح میبینید که رادار وسیلهای بسیار کاربردی میباشد. در این بخش از مقالات ما به اسرار رادار میپردازیم. استفاده از رادار عموماً در راستای سه هدف زیر میباشد:
شناسایی حضور یا عدم حضور یک جسم در فاصلهای مشخص – عمدتاً آنچه که شناسایی میشود متحرک است و مانند هواپیما ، اما رادار قادر به شناسایی حضور اجسام که مثلاً در زیر زمین نیز مدفون شدهاند، میباشد. در بعضی از موارد حتی رادار میتواند ماهیت آنچه را که مییابد مشخص کند، مثلاً نوع هواپیمایی که شناسایی میکند. شناسایی سرعت آن جسم- دقیقاً همان هدفی که پلیس از آن در بزرگراهها برای کنترل سرعت خودروها از آن استفاده میکند.
جابجایی اجسام – شاتلهای فضایی و ماهوارههای دوار بر دور کره زمین از چیزی به عنوان رادار حفرههای مجازی برای تهیه نقشه جزئیات ، نقشههای عوارض جغرافیایی سطح ماه و دیگر سیارات استفاده میکنند. تمام این سه عملیات میتواند با دو پدیدهای که شما در زندگی روزمره با آن آشنائید پیاده شود: «پژواک» و «پدیده دوپلر» این دو پدیده بسادگی قابل فهم میباشند، چرا که هر روزه شما با آنها در حوزه شنوایی خویش برخوردارید. رادار از این دو پدیده در حوزه امواج رادیویی استفاده میبرد.
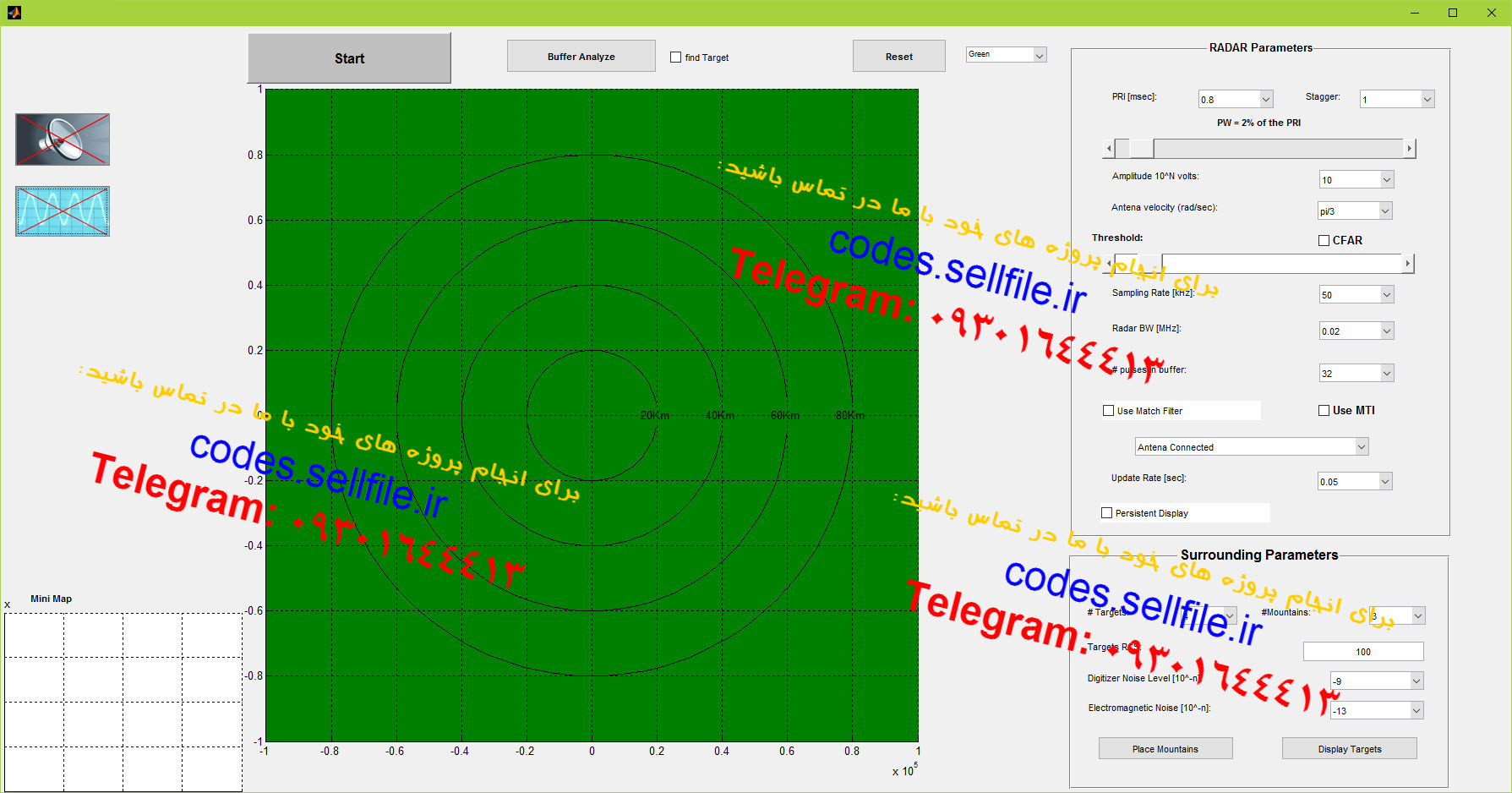
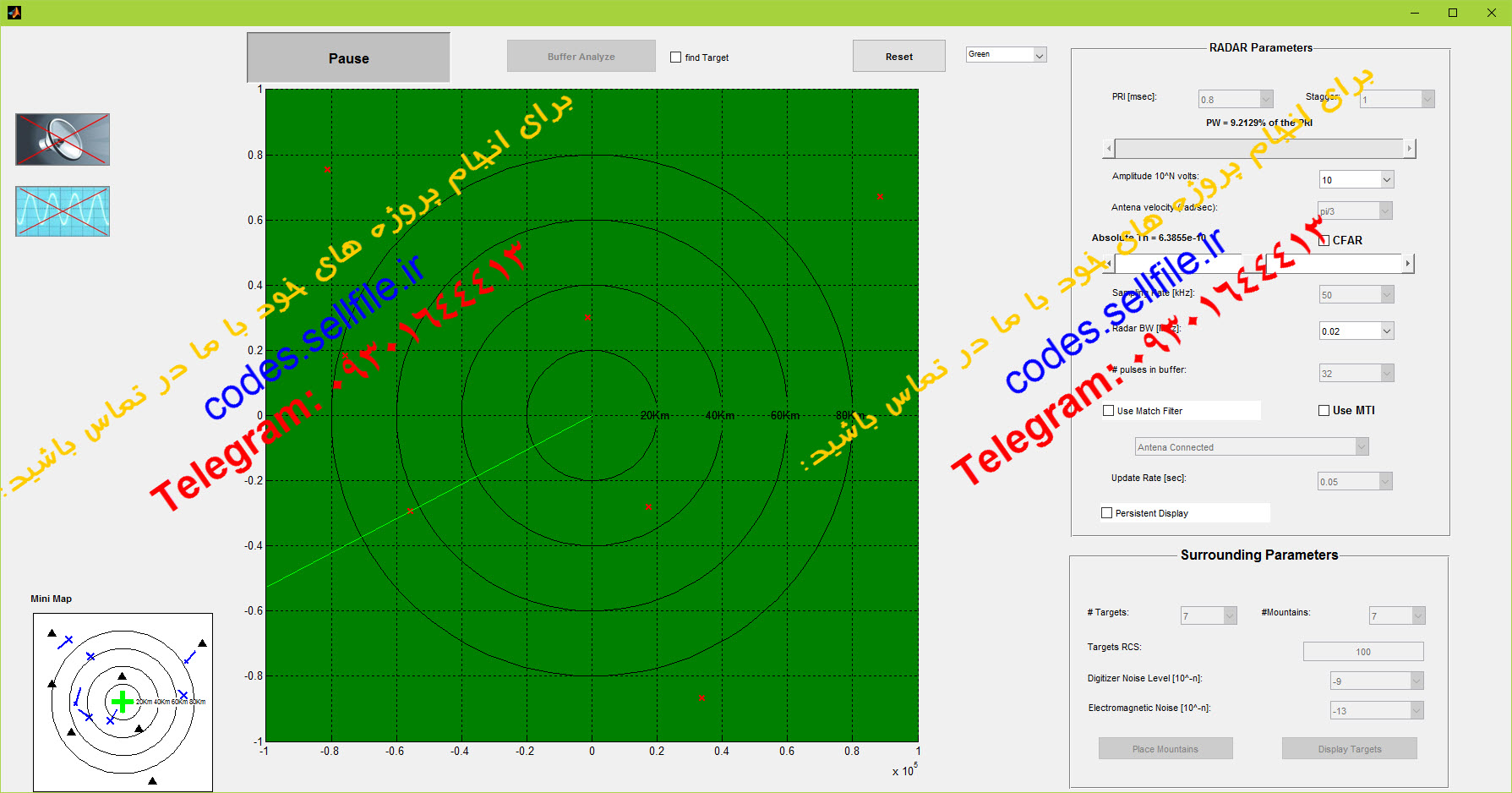
نمونه تصاویر خروجی:

ویژگی های این برنامه:
1. استفاده از مکانیزم CFAR
2. تجزیه و تحلیل MTI در دامنه فرکانسی
3. پشتیبانی از Stagger
4. تنظیم پارامترهای مختلف مانند Amplitude ، RPI، Antena Velocity سرعت آنتن ، Radar (BW) Band Width، نرخ نمونه برداری ، میزان نویز الکترومغناطیسی ، پارامترهای محیطی مختلف
5. فیلتر همسان یا فیلتر تطبیق یافته
6. بازخوردهای آنالوگ
این یک شبیه سازی از یک رادار هشدار زود هنگام است. شبیه سازی تولید اهداف تصادفی (مختصات، سرعت، شتاب و رادار مقطع (RCS)).
برای هر پالس رادار شبیه سازی محاسبه بازده که رادار از تمام اهداف با توجه به فرمول رادار را دریافت خواهد کرد (با توجه به قدرت انتقال حساب، آنتن، هدف قرار مسافت و اهداف RCS). شبیه سازی محاسبه دامنه و فاز سیگنال بازگشت (با توجه به فرکانس IF).
این رادار ایجاد یک بردار از نمونه های آن به عنوان سیگنال های پیچیده (به نمایندگی از دامنه و فاز تاخیر) و می افزاید: به سر و صدا RF تصادفی پیچیده است. بردار می رود از طریق LPF نمایندگی BW گیرنده و پس از آن یکی دیگر از سر و صدا تصادفی پیچیده نمایندگی نویز حرارتی رادار (در دیجیتایزر) اضافه کنید.
این رادار موجب صرفه جویی در چند دوره پذیرش به یک بافر و سپس پردازش کل بافر. این رادار قادر است یک فیلتر بازی بیش از سیگنال دریافتی را انجام دهد. این رادار تجزیه و تحلیل هر سلول وسیعی در بافر در جستجوی یک هدف است.
آستانه تشخیص می تواند با توجه به آمار بافر (نوعی از ثابت نرخ هشدار غلط (CFAR)) ثابت و یا پویا.
در صورت حرکت هدف شاخص (MTI) استفاده می شود تشخیص هدف است در هواپیما فرکانس سیگنال پیچیده انجام می شود.
هر هدف شناسایی شده است بر روی صفحه نمایش رادار اصلی رسم شده است. در صورت MTI استفاده یک نماینده از سرعت هدف را نیز رسم (اهداف لوازم التحریر به عنوان کوه رسم). توجه داشته باشید که رادار تنها می تواند برآورد سرعت نسبی بین هدف و رادار (هر سرعت مماس از دست داده است).
آنچه تحویل داده می شود:
1. کد برنامه قابل اجرا در متلب - خروجی طبق تصویر نمونه آورده شده (این برنامه درMatlab R2014a تست شده و 100 درصد به صورت تضمینی قابل اجرا می باشد)
1. فایل راهنمای اجرای برنامه
در صورتی که بخواهید می توانیم با قیمتی مناسب داکیومنت توضیحات این پروژه را تهیه کرده و تقدیم نماییم.
مناسب برای دانشجویان کارشناسی (لیسانس) و کاردانی و کارشناسی ارشد
می توان به عنوان پروژه دروس کارشناسی یا کاردانی یا کارشناسی ارشد، دروسی مانند شبیه سازی کامپیوتری ، شبیه سازی پیشرفته ، شبیه سازی و مدل سازی رایانه ای ، شبکه های کامپیوتری، شبکه کامپیوتری پیشرفته، شبکه های بیسیم ،مهندسی هوا و فضا، پدافند غیرعامل ، رادار شناسی ، تجزیه و تحلیل امواج
پس از خرید از درگاه امن بانکی، لینک دانلود در اختیار شما قرار میگیرد و همچنین به آدرس ایمیل شما فرستاده می شود. تماس با ما برای راهنمایی، درخواست مقالات و پایان نامه ها و یا ترجمه و یا انجام پروژه های برنامه نویسی و حل تمرینات با آدرس ایمیل:
ebarkat.shop@yahoo.com
یا شناسه تلگرام (آی دی تلگرام ما): @ebarkat
توجه: اگر کارت بانکی شما رمز دوم ندارد و یا در خرید الکترونیکی به مشکل برخورد کردید و یا به هر دلیلی تمایل به پرداخت الکترونیکی ندارید با ما تماس بگیرید تا راههای دیگری برای پرداخت به شما پیشنهاد کنیم.
توجه توجه توجه: هرگونه کپی برداری و فروش فایل های فروشگاه برکت الکترونیک (به آدرس ebarkat.ir یا codes.sellfile.ir) در فروشگاه های دیگر شرعاً حرام است، تمامی فایل ها و پروژه های موجود در فروشگاه، توسط ما اجرا و پیاده سازی و یا از منابع معتبر زبان اصلی جمع آوری شده اند و دارای حق کپی رایت اسلامی می باشند.
از پایین همین صفحه (بخش پرداخت و دانلود) می توانید این پروژه را خریداری و دانلود نمایید.
کد محصول 302476
دانلود سورس کد شبیه سازی رادار RADAR هشداردهنده زودهنگام به زبان متلب با نمایش گرافیکی
")



